Конкурс проектов
"Большие вызовы"
Направление: Агропромышленные и биотехнологии
Сельское хозяйство – это ключевая отрасль мировой экономики, которая обеспечивает население едой. Россия богата землями, а это значит, что мы легко можем обеспечить себя продовольствием. Однако и проблем в сельском хозяйстве достаточно...
Мы решили не затрагивать глобальные темы, а начать с малого. В своем проекте нас заинтересовал вопрос: "Как с помощью современных технологий помочь владельцам огородов?"
Конечно, уже существует большое множество автоматов помогающим в этом. Но все они имеют узкую спецификацию и являются в большинстве случаев стационарными. Это требует от человека определенных временных затрат на разборку и установку в другом месте или покупки нескольких систем для охвата всей площади огорода. Безусловно перед нами сразу появляется образ робота, который сможет с легкостью перемещаться по огороду и выполнять поставленные задачи.
Исходя из этого нами была поставлена следующая цель: «Создать роботизированную платформу способную перемещаться в ограниченном пространстве огорода и нести определенный груз».
Универсальная роботизированная тележка для огорода
Авторы проекта:
Казбеков Муслим
Кисловский Денис
Кошевой Матвей
Тусида Никита
Руководитель проекта:
Ничков Николай Викторович,
учитель технологии
Был составлен план работы над проектом:
-
Изучить объект, на котором придется выполнять определенные действия будущему роботу.
-
Познакомиться и определить достоинства и недостатки уже существующих роботизированных платформ подобного рода.
-
Обсудить и определить как будет выглядеть роботизированный механизм, который бы удовлетворял нашим требованиям для работы в предлагаемых ему условиях.
-
Смоделировать и создать «универсальную роботизированную тележку для огорода».
-
Запрограммировать робота.
1. Изучение объекта, на котором будет выполнять свои действия «универсальная роботизированная тележка для огорода»
Первой задачей стояло изучение территории (объекта), на которой нашему роботу придется функционировать.
Поэтому решено было определиться с такими понятиями как огород, грядка, теплица, парник. Проанализировав словари, мы получили такие определения этим понятиям:
-
«Огоро́д — участок земли, большей частью огороженный забором или живой изгородью и предназначенный для разведения (выращивания) овощей и других огородных растений, снедной зелени, ботвы, капусты и кореньев: репы, моркови, картофеля, лука и прочего».
-
«Огоро́д – участок земли, засеянный овощами, обычно обнесенный изгородью»


3. «Грядка огородная — узкая полоса разрыхлённой или обработанной другим образом земли в огороде или саду, отделяемая от соседних бороздами или дорожками, предназначенная для выращивания на ней овощных или фруктовых растений. Участок земли, используемый для выращивания сельскохозяйственной продукции, разбивают на слегка возвышенные грядки для обеспечения растениям более глубокого, хорошо разрыхленного и прогреваемого слоя почвы, в также для удобства обслуживания. Огородные грядки в зависимости от почвы, рельефа местности и выращиваемой культуры рекомендуется делать шириной 70-100 см, высотой 10-25 см и с расстоянием между грядками 30-40 см. Для теплолюбивых растений грядки делают выше, чем для холодностойких. Уход за грядками заключается в поливке, прополке сорняков, рыхлении почвы и внесении удобрений»




4. «Парни́к — малогабаритное неотапливаемое строение для защиты культурных растений от воздействия неблагоприятных погодных условий. Представляет собой малогабаритное культивационное сооружение, имеющее боковое ограждение и съёмную свето-прозрачную кровлю, полностью или частично погруженное в почву, обслуживаемое рабочими, находящимися вне помещения. Различают холодные, полухолодные и тёплые парники».
5. «Парник – сооружение небольшой ширины и высоты. Такие конструкции состоят из нескольких дуг, сверху – прозрачный полиэтилен. Одним концом он крепится к длинному бортику парника гвоздями или строительным степлером, второй перекидывается через верх и натягивается с другой стороны. Чтобы полиэтилен не сдуло, на свободный конец крепят равный по длине брус, такой, чтобы было несложно поднимать его по необходимости».




6. «Теплица – это непереносное сооружение, которое используется с ранней весны до поздней осени. Она состоит из каркаса и покрытия – сотового поликарбоната или пленки. Самый лучший вариант для каркаса – оцинкованная сталь. Она не ржавеет, отличается высокой прочностью и долгим эксплуатационным сроком».

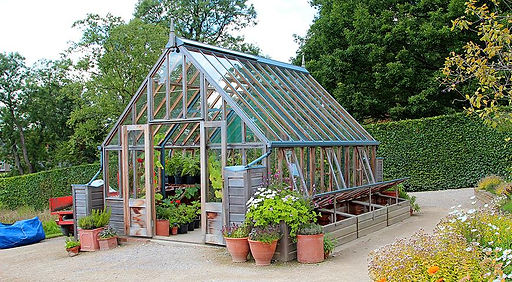
Проанализировав эти понятия и фотографии из сети Интернет мы пришли к такому выводу: Огород – это чаще всего ровный участок земли, огороженный забором и с расположенным на нем такими сооружениями как междурядье (тропинка), грядка, теплица, парник, предназначенный для разведения (выращивания) овощей и других огородных растений.
Так как на огороде основными являются огородные грядки, то и наша роботележка в первую очередь должна при перемещении учитывать эти сооружения (ситуации, где на огороде есть парники и теплицы в этом проекте мы решили не рассматривать, а оставить для наших будущих изысканий).

2. Достоинства и недостатки существующих роботизированных платформ агротехнического комплекса
Разобравшись с объектом, на котором придется действовать универсальной роботизированной тележке, мы перешли к решению второй задачи: «Познакомиться и определить достоинства и недостатки уже существующих роботизированных платформ подобного рода».
Проанализировав стати и видео из сети Интернет мы разделили агротехнических роботов на 3 группы по их взаимодействию с объектом: стационарные, перемещающиеся между рядов посадок, перемещающиеся над рядами посадок.
№
Группа
Достоинства
Недостатки
1
Стационарные
Легкость настройки и точность выполнение действий.
Ограниченная высота растений, которых можно выращивать этой группой роботов;
Охват малой площади обработки;
Требуется несколько роботов, чтобы охватить весь участок огорода или постоянно разбирать и собирать в другом месте.

2
Перемещающиеся между рядов посадок
Может работать с растениями любой высоты;
Довольно компактный робот, занимающий малую площадь на междурядье;
Может легко перемещаться по междурядью и этим охватить всю площадь огорода.

Из-за маленьких горизонтальных размеров может нести ограниченный «полезный груз»;
Из-за довольно большой высоты робота, он может быть неустойчив на неровной рыхлой поверхности огорода;
Может обрабатывать растительность, только расположенную рядом с междурядьем;
Ширина грядок будет минимальной для максимального охвата растительности и уменьшена полезная площадь огорода, занятая под посадки, из-за увеличения числа дорожек для перемещения робота.


3
Перемещающиеся над рядами посадок
Легко перемещается по огороду с любым расположением грядок;
Может нести большой объем «полезной нагрузки»;
Устройство робота позволяет просто и быстро установить и настроить рабочие механизмы для обработки всей поверхности занятой под посадки;
Не требует широких размеров дорожек между грядками.
Ограниченная высота растений, которых можно выращивать этой группой роботов;
У существующих, автоматических системах на сегодняшний день, для разворота необходима специальная территория с обеих сторон огорода, что уменьшает полезную площадь огорода.



3. Обсуждение и определение внешнего вида «универсальной роботизированной тележки для огорода», которая бы удовлетворяла нашим требованиям для работы в предлагаемых ей условиях.
Проанализировав недостатки и достоинства всех трех групп роботов, решено было заняться проектированием роботележки по своим характеристикам относящийся к третьей группе «робот перемещающиеся над рядами посадок», так как такой робот устойчив благодаря тому, что точки опоры (колеса) будут разнесены достаточно далеко друг от друга и поэтому не потребует от нас каких-то сложных конструкторских решений. Основными посадками в огороде являются овощные культуры, имеющие не большую высоту стеблей. И такого типа робот вполне подходит для наших целей. Так же решено было попытаться лишить нашу роботележку такого недостатка: «для разворота необходима специальная территория с обеих сторон огорода».
В результате мозгового штурма и последующего анализа предложенных вариантов конструкции как самой роботележки, так и ее узлов необходимых для выполнения соответствующих действий на территории огорода, мы пришли к единственному оптимальному варианту «универсальной роботизированной тележки для огорода».

Данная вариант роботележки имеет 6 степеней свободы (не только каждое колесо может вращаться вокруг своей горизонтальной оси, но и каждая пара колес (левая пара или правая пара), так же может вращаться вокруг общего левого или правого центра). Это особенность дает возможность перемещаться тележке во всех направлениях и совершать сложные маневры, которые позволят сократить ширину дорожек с обеих сторон огорода и увеличить полезную площадь под посадки.

4. Моделирование и создание «универсальной роботизированной тележки для огорода».
После анализа внешнего вида роботележки мы определили из каких частей будет состоять наш робот: поворотная платформа с колесом (4 шт.), боковая рама (2 шт.), поворотный шарнир для верхней платформы (2 шт.), верхняя платформа для размещения рабочих органов для обработки почвы и растительности (1 шт.).
Решено было создать универсальную роботизированную тележку для огорода на основе конструктора LEGO MINDSTORMS EV3, так данный конструктор имеется в наличие в нашей школе. Данный конструктор не позволял создать прототип необходимого нам размера и корпус роботележки решили создавать из картона от коробок (этот материал отличается достаточной прочностью и легкостью). Колеса и оси были взяты для проекта от старой детской коляски. Все поворотные стойки решено было изготовить из корпусов старых маркеров, а втулки для стоек из пластиковых крышек разного диаметра.







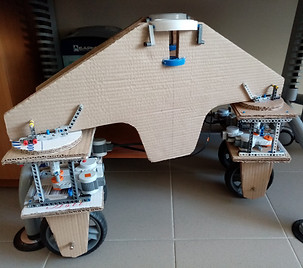


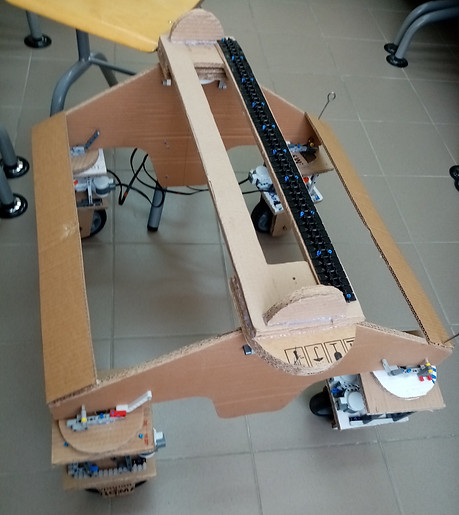
После создания корпуса робота были выявлены некоторые проблемы, связанные с недостаточной точностью ручного изготовления и подгонки движущихся узлов тележки. Собранная роботележка имела неустойчивую конструкцию и при устранении данной проблемы механизм лишился той свободы подвижности, которую мы планировали изначально.
К этому моменту на базе нашей школы открылась «Точка роста» и поступило новое оборудование, среди которого и модульные станки с функцией 3д-принтера. По предложению нашего руководителя проекта было решено заново создать корпус тележки используя новую появившуюся в школе технологию 3д-печати, что позволила нам создать точные модели узлов.
Мы полностью заменили все картонные детали, оставить от прошлого проекта только колеса, оси и «электронную начинку» из конструктора LEGО. Решено было поворотные стойки делать из металлических трубок диаметром 16 мм., а боковые панели изготовили из 5 мм. фанеры. Также перенесли механизм поворота колеса на корпус, что позволило упростить и уменьшить в размере сами шасси робота.
Сначала, нам пришлось с моделировать в программе виртуального моделирования tinkercad все части шасси с поворотными стойками. В данных моделях понадобилось создать крепления под элементы и модули LEGO, что при сборке облегчило их монтаж.




Поворотную нижнюю втулку пришлось сделать разборной, для возможности разделения шасси от корпуса робота для замены и ремонта при необходимости.
Сборка шасси к боковой панели была произведена с помощью саморезов.
Для центральной части боковой панели, под поворотный механизм верхней платформы для крепления оборудования в 3д-редакторе были смоделированы, а затем и распечатаны на 3д-принтере следующие детали: центральная поворотная втулка, верхняя втулка под платформу.




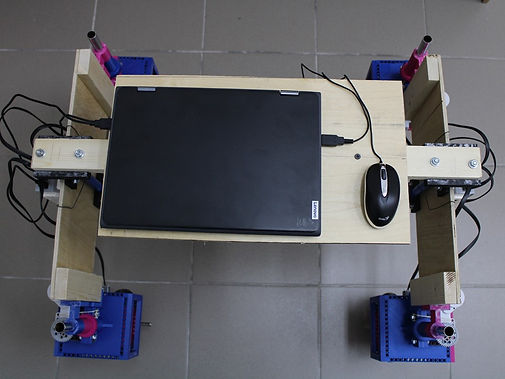
В э�том проекте мы отказались создавать полностью верхнюю платформу, а заменили ее перемычкой из бруска, так как решили посветить созданию навесного оборудование следующий проект. Центральную стойку с боковой панелью и втулку с бруском верхней платформы соединили с помощью Болтов М6. Произвели сборку корпуса роботележки, параллельно установив на месте все необходимые электродвигатели.


Общие габаритные размеры модели роботележки получились такими: высота - 55 см., длина - 60 см., ширина - 73 см.
Конечно, наш робот это всего лишь модель (уменьшенная копия). Полномасштабной версии "универсальной роботизированной тележки для огорода" в будущем пришлось бы обрабатывать огородные грядки шириной 70-100 см, высотой 10-25 см и с расстоянием между грядками 30-40 см.
Созданный в этом проекте робот способен перемещаться вдоль грядок до 44 см. шириной, междурядьями 14 см. шириной и над посадками с растительностью высотой до 50 см.


5. Установка микроконтроллеров и программирование
«универсальной роботизированной тележки для огорода».
На корпус роботележки, было установлено 2 микроконтроллера EV3, так как для движения и поворотов использовались 8 электродвигателей, а каждый микроконтроллер способен управлять только 4-мя. Связь контроллеров между собой решили сделать шлейфом черед USB-кабель.
К большому нашему сожалению, время на выполнения проекта подходило к завершению и нам пришлось отказаться от установки датчиков и заняться программированием роботележки.
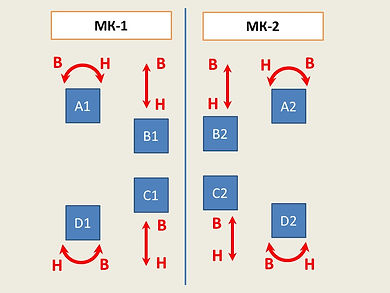
В этом проекте мы решили «научить» нашего робота выполнять разные виды перемещений: движение вперед, движение назад, движение боком вправо и лево, разворот на месте, повороты вправо и влево используя одну стойку шасси. Чтобы начать написание данных программ составили схему вращений всех двигателей относительно корпуса робота.
Для снижения нагрузки на двигатель, из-за веса и больших колес был применен червячный редуктор от двигателя к колесу в соотношении 40х1 (40 оборотов двигателя соответствовало 1 обороту колеса), понадобилось рассчитать пройденный путь на одно вращение колеса по формуле x=2ПR. После расчетов пройденный путь на 1 оборот колеса составил 0,49 м. (49 см.). Соотношение редуктора в поворотных осях колес составил 1х1, поэтому дополнительных расчетов не потребовалось.
Программирование робота велось в визуальной среде LEGO MINDSTORMS EV3 Home Edition:
-
Программный модуль для движения вперед и назад;

2. Программный модуль для движения боком вправо-влево;

3. Программный модуль для разворота на месте;

4. Программный модуль для разворота вправо и влево используя одну стойку шасси.


6. Выводы.
Проанализировав ход проекта можно сделать такие выводы:
-
Поставленная цель проекта по созданию роботизированной платформы способной перемещать в ограниченном пространстве огорода и нести определенный груз можно считать достигнутой;
-
Благодаря конструкции с 6 степенями свободы робот может выполнять довольно сложные маневры на ограниченной территории огорода, не повреждая зеленные насаждения.
Так же в ходе работы над проектом появились новые задачи, требующие от нас дальнейшей доработки роботележки в своих следующих проектах:
-
Установка датчиков для позиционирования робота на территории огорода;
-
Создание сменных роботизированных агрегатов для выполнения следующих видов работ:
-
Рыхление почвы между культурами;
-
Прополка от сорняков;
-
Автоматический сбор созревшего урожая;
-
Определение влажности почвы и последующая поливка;
-
-
Доработка теплицы для работы в ней роботележки.
Тем не менее уже такая созданная нами тележка может быть использована в огородной хозяйстве, с небольшой доработкой верхней платформы для установки ящиков и пульта управления, что позволит человеку производит сбор урожая овощных и ягодных культур (земляники, огурцов, низкорослых томатов и т.д.) не повреждая посадки и не нося с собой тяжелые ведра под урожай.